
An online prediction and compensation method for robot position errors embedded with error-motion correlation
Published in May 11, 2024
Contribution
An online prediction and compensation method for robot position errors embedded with an error-motion correlation was presented in this study. The main contributions of this study are as follows:
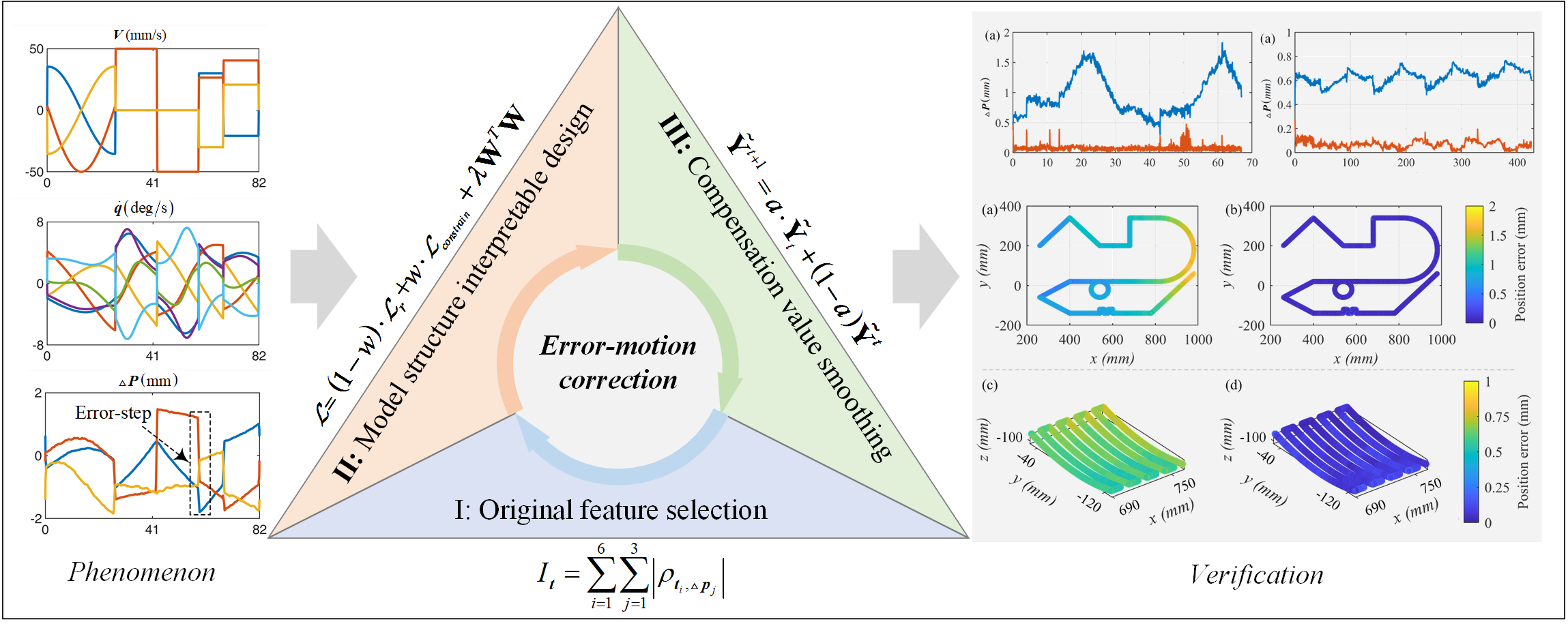
- The nature of the error-step phenomenon prevalent in robots during motion reversal was revealed and defined as the error-motion correlation by analyzing the relationship between the robot motion and position errors.
- Based on the analyzed error-motion correlation, the method was designed considering three aspects: original feature selection, model structure interpretability design, and compensation value smoothness. The proposed method can realize error-step self-discovery, self-adjustment, and smooth compensation under the premise of accurate prediction.
- A comparative validation of the proposed method was conducted for two tasks, ISO 9280-1998 no-load trajectory and robotic machining. The proposed method exhibits a pronounced advantage in terms of online prediction accuracy, thereby outperforming the state-of-the-art alternatives with impressive RMSE reductions of 66.47% and 75.93% for these tasks, respectively. The online error compensation system operated at a high frequency of 250 Hz, thereby leading to a substantial reduction in the average position errors of 92% and 89% for the aforementioned tasks. Further, the system slightly diminished the fluctuations in the compensated position errors, thereby leading to a significant enhancement in global consistency.
Based on the research conducted in this study, we will further investigate the application of the proposed method under different working conditions to adapt the robot to scenarios such as aerospace cabin segments and propellers. Further, we will consider combining a trajectory planning study with the proposed method to further optimize the robot error step phenomenon.
Graphic Abstracts
The graphic abstract is shown below
Recommended citation: T. Zhang, H. Sun, F. Peng, X. Tang, R. Yan, R. Deng, An online prediction and compensation method for robot position errors embedded with error-motion correlation, Measurement, (2024) 114866, https://doi.org/10.1016/j.measurement.2024.114866. https://doi.org/10.1016/j.measurement.2024.114866