
Spatial–temporal feature fusion for intelligent foreknowledge of robotic machining errors
Published in Jan 18, 2025
Contribution
On the one hand, this paper can adequately qualitatively analyze the spatial–temporal coupling characteristics of robotic machining errors, and on the other hand, the proposed method can provide a theoretical and modeling basis for the subsequent development of online compensation of robotic machining errors. The contribution of this paper can be summarized as,
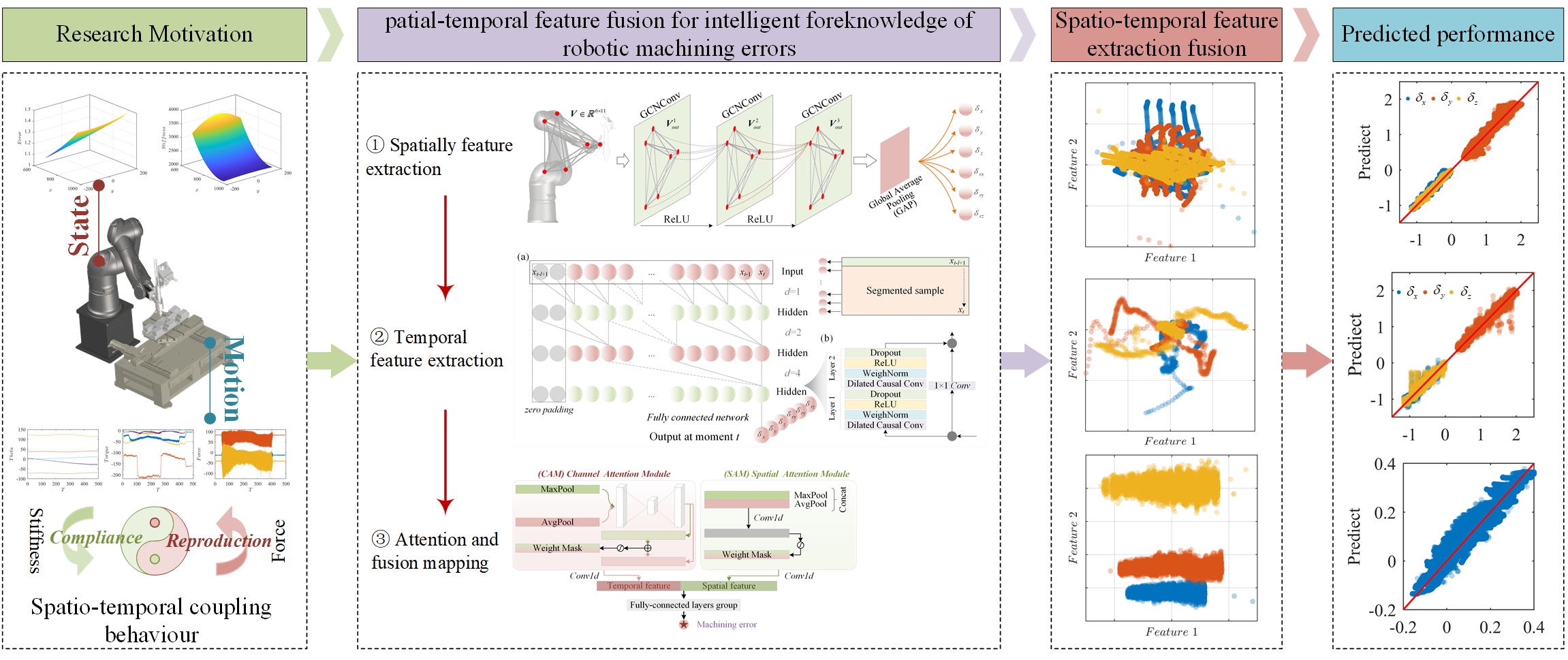
- Firstly, from the three aspects of processing error causes, data analysis and feature extraction, it reveals that the robot processing process is a complex coupled system with spatial–temporal relationship. The robot ontology error and robot processing error are coupled and coexist. Based on this cognition and analysis, a spatial-temporal feature fusion method for intelligent prediction of robot processing error is proposed in this work.
- Secondly, the proposed method achieves accurate feature extraction and reliable prediction of robot processing error with the help of designed spatial and temporal feature extraction module, spatial–temporal attention mechanism module, and 18 feature level fusion mapping module altogether. The contribution of each module in ensuring the prediction accuracy method is verified through feature analysis and ablation experiments, etc.
- Finally, the proposed method was experimentally validated on the inner wall features of a profiled compartment segment. Five parts designed were utilized for training and three parts for testing. A minimum RMSE of 0.026 mm is finally achieved, which is significantly better than other common methods.
Graphic Abstracts
The graphic abstract is shown below
Recommended citation: Zhang, T., Peng, F., Wang, J., Yang, Z., Tang, X., Yan, R., Zhao, S., & Deng, R. (2025). Spatial–temporal feature fusion for intelligent foreknowledge of robotic machining errors. Robotics and Computer-Integrated Manufacturing, 94, 102972, https://doi.org/10.1016/j.rcim.2025.102972. https://doi.org/10.1016/j.rcim.2025.102972